




Resource Name
فى هذا الدرس سنتعلم كيف نتحكم فى محرك تيار مستمر باستخدام لوحة راسبيرى باى بيكو 2w حيث سنتحكم فى سرعة دوران المحرك واتجاه الدوران باستخدام ميكروبايثون.

قم بتوصيل الأسلاك بين محرك التيار المستمر وقائد المحركات ولوحة راسبيرى باى بيكو 2Wكما فى الصورة التى فى الأسفل.
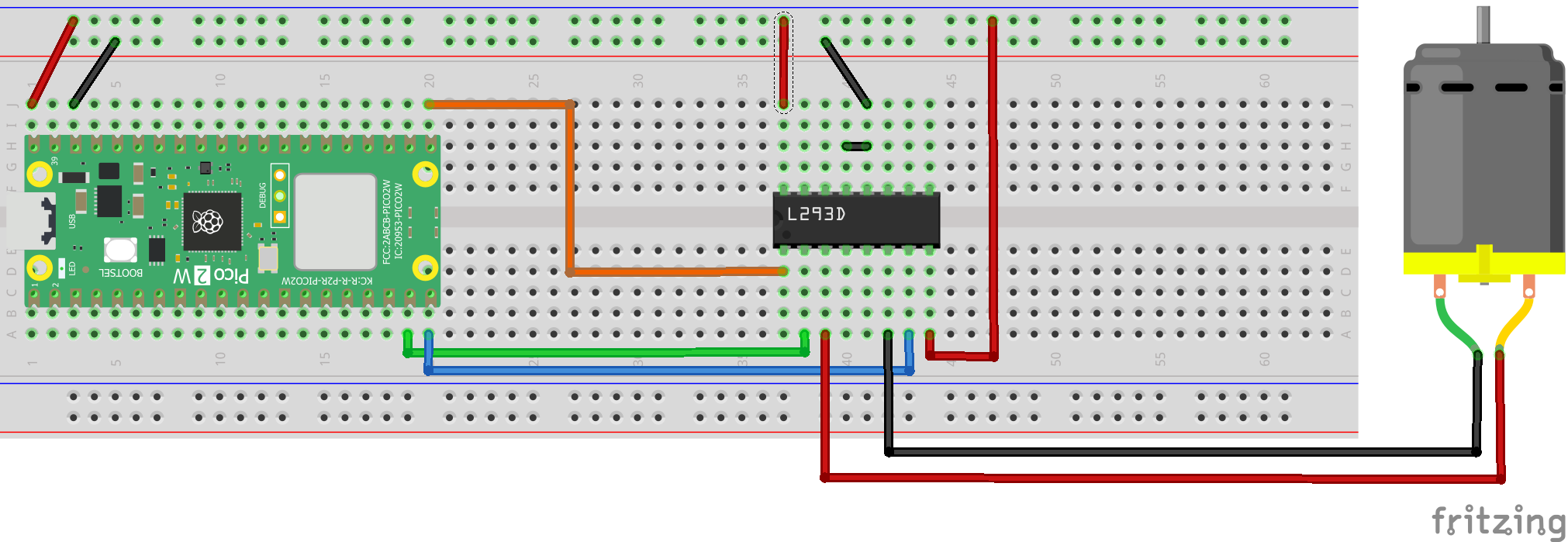
التوصيلات من لوحة راسبيرى باى بيكو 2W :
• منفذ الVBUS بلوحة راسبيرى باى بيكو 2W بالمنافذ الموجبة بلوحة التجارب
• منفذ الGND بلوحة راسبيرى باى بيكو 2 W المنافذ السالبة بلوحة التجارب
التوصيلات من قائد المحركات L293D :
• منفذ VCC 1 ومنفذ VCC 2 لقائد المحركات ←المنافذ الموجبة للوحة التجارب
• منافذ ال gnd لقائد المحركات ← المنافذ السالبة للوحة التجارب
• منفذ ENABLE 1,2 لقائد المحركات ←منفذ رقم 16 في لوحة راسبيرى باى بيكو 2W
• منفذ 1 Input لقائد المحركات ←منفذ رقم 14 في لوحة راسبيرى باى بيكو 2W
• منفذ 2 Input لقائد المحركات ←منفذ رقم 15 في لوحة راسبيرى باى بيكو 2W
التوصيلات من محرك التيار المستمر:
• احد اطراف المحرك ← منفذ Output1 بقائد المحركات
• الطرف الاخر للمحرك ←منفذ Output2 بقائد المحركات
وظيفة الكود التالى هو التحكم فى سرعة دوران المحرك واتجاه الدوران باستخدام ميكروبايثون.
بعد رفع الكود البرمجى سوف تجد ان المحرك يدور يمينا لمدة ثانيتان ومن ثم يتوقف لمدة ثانيتان ومن ثم يدور يسارا لمدة ثانيتان.