



Resource Name
A servo motor is just a simple DC motor with certain modifications. When you look at it, you’ll notice that it has several gears and an electronic circuit. These improvements provide the motor with new capabilities, such as precise control of the shaft’s speed and direction.

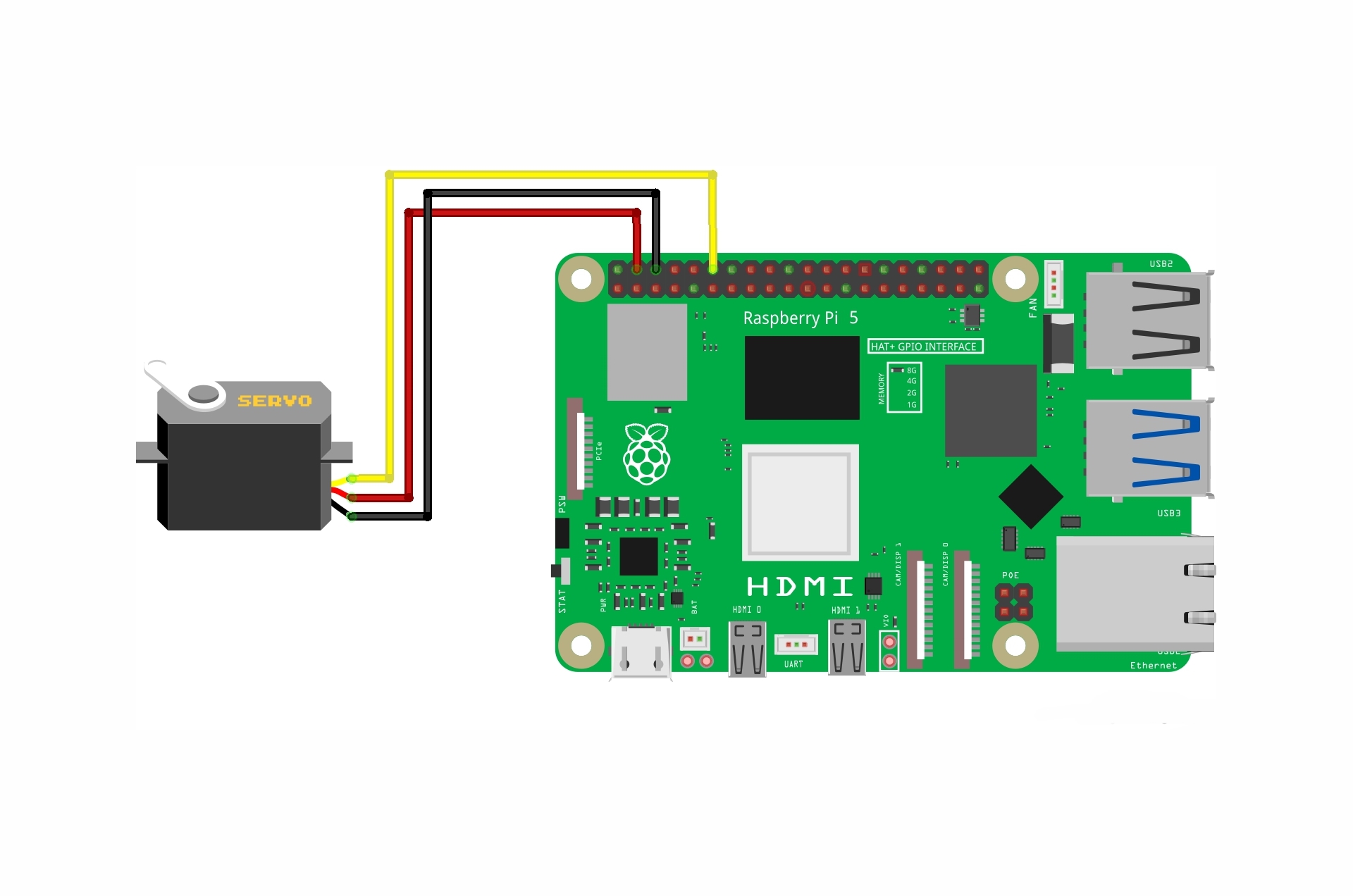
In this tutorial, we will use the Raspberry pi 5 to control the servo motor shaft to sweep back and forth across 180 degrees.


Connections from the servo motor:
• Servo GND pin→ Raspberry pi 5 GPIO GND pin
• Servo VCC pin→ Raspberry pi 5 GPIO 5V pin
• Servo signal pin → Raspberry pi 5 GPIO pin 18
Now on your Raspberry Pi, click on the menu, then choose programming, then open the Thonny ide program.

Now copy that code into it, The function of this code is to control the servo motor shaft to sweep back and forth across 180 degrees.
Now run the code, you will find that the Raspberry pi 5 control the servo motor shaft to sweep back and forth across 180 degrees.





