





Resource Name

في هذا الدرس سنتعلم كيفية استخدام لوحة المفاتيح مع لوحة الراسبيرى باي بيكو2W في الجزء الأول سنقوم بعرض الزر الذي تضغط عليه في لوحة المفاتيح على الشاشة، وفي الجزء الثاني سنبني نظاماً لتحريك محرك السيرفو بزوايا معينة عند الضغط على أزرار معينة في لوحة المفاتيح.

قم بتوصيل الأسلاك بين لوحة راسبيرى باى بيكو 2W ولوحة المفاتيح ومحرك السيرفو كما فى الصورة التالية :
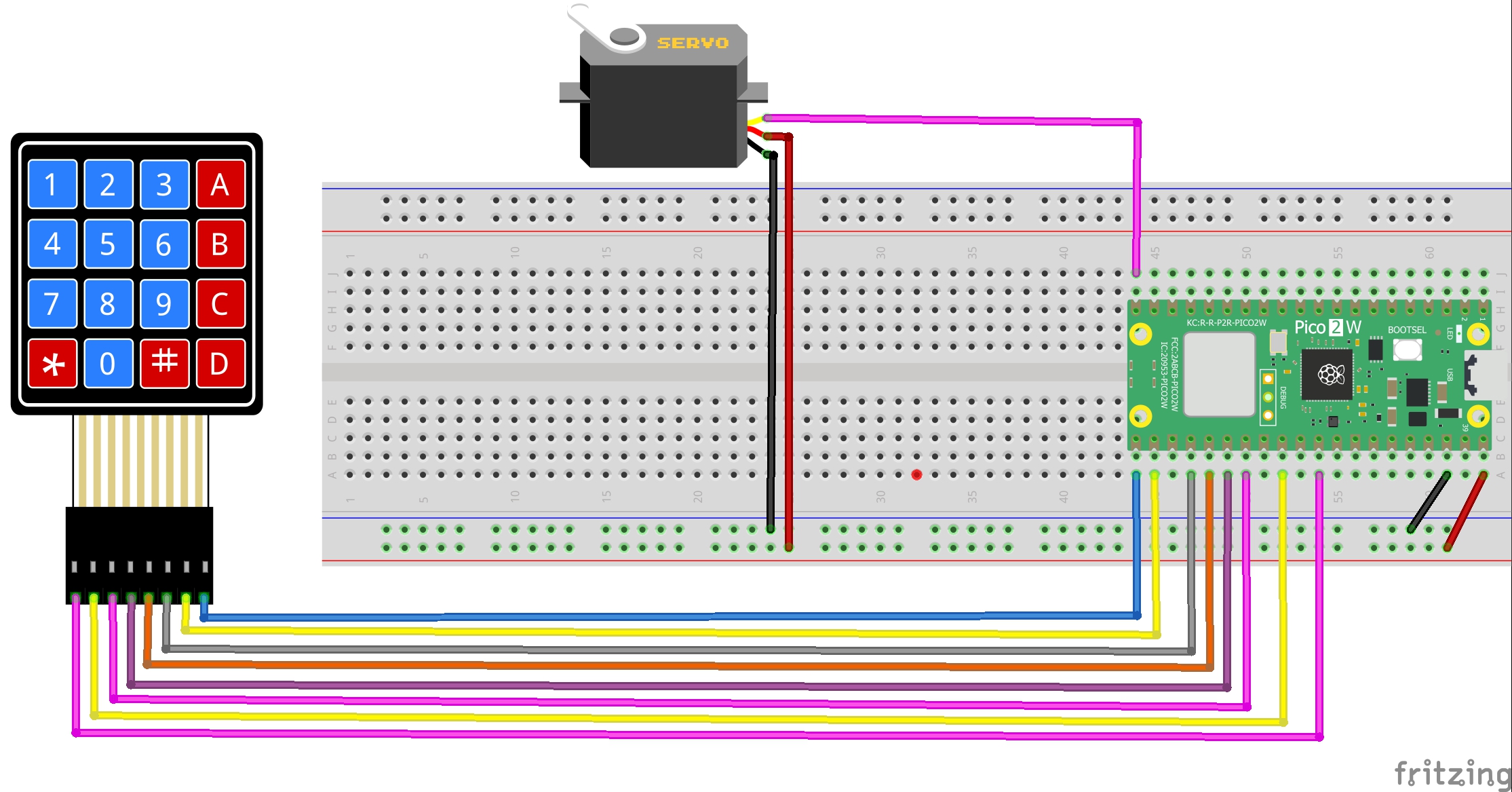
التوصيلات من لوحة راسبيرى باى بيكو 2W :
• نقوم بتوصيل منفذ ال VBUS بلوحة راسبيرى باى بيكو2W ← المنافذ الموجبة بلوحة التجارب
• منفذ ال GND بلوحة راسبيرى باى بيكو2W ←المنافذ السالبة بلوحة التجارب
ثانيا : لوحة المفاتيح
• منفذ رقم 1 ← منفذ رقم 16 فى لوحة راسبيرى باى بيكو 2W
• منفذ رقم 2 ← منفذ رقم 17 فى لوحة راسبيرى باى بيكو 2W
• منفذ رقم 3 ← منفذ رقم 18 فى لوحة راسبيرى باى بيكو 2W
• منفذ رقم 4 ← منفذ رقم 19 فى لوحة راسبيرى باى بيكو 2W
• منفذ رقم 5 ← منفذ رقم 20 فى لوحة راسبيرى باى بيكو 2W
• منفذ رقم 6 ← منفذ رقم 21 فى لوحة راسبيرى باى بيكو 2W
• منفذ رقم 7 ← منفذ رقم 22 فى لوحة راسبيرى باى بيكو 2W
• منفذ رقم 8 ← منفذ رقم 26 فى لوحة راسبيرى باى بيكو 2W
التوصيلات من محرك السيرفو:
• المنفذ الموجب لمحرك السيرفو ← المنافذ الموجبة بلوحة التجارب
• المنفذ السالب لمحرك السيرفو ←المنافذ السالبة بلوحة التجارب
• منفذ الإشارة لمحرك السيرفو ← منفذ رقم 15 في لوحة راسبيرى باى بيكو 2W
وظيفة الكود البرمجى الأول هو عرض الزر الذي تضغط عليه في لوحة المفاتيح على الشاشة، ووظيفة الكود البرمجى الثانى هو تحريك محرك السيرفو بزوايا معينة عند الضغط على أزرار معينة في لوحة المفاتيح.
بعد رفع الكود البرمجي الأول قم بالضغط على أحد الأزرار بلوحة المفاتيح وستجد أنه يتم عرض الزر الذي تضغط عليه في لوحة المفاتيح على الشاشة، وبعد رفع الكود البرمجي الثاني ستجد أنه يتم تحريك محرك السيرفو بزوايا معينة عند الضغط على أزرار معينة في لوحة المفاتيح.